Quando começamos a trabalhar com motores elétricos controlados por inversores, ESCs (Electronic Speed Controllers) ou pontes trifásicas baseadas em MOSFETs, uma dúvida muito comum surge: por que os MOSFETs costumam esquentar mais em baixas rotações do motor e, muitas vezes, permanecem quase frios em rotações elevadas?
À primeira vista isso parece contraditório. Muitas pessoas imaginam que quanto maior a velocidade do motor, maior será o esforço eletrônico e, consequentemente, maior será o aquecimento dos transistores. Porém, na prática, ocorre justamente o contrário em muitos sistemas. Em diversas aplicações, especialmente em motores Brushless DC (BLDC) e motores síncronos trifásicos, o aquecimento dos MOSFETs tende a ser muito maior em baixas rotações.
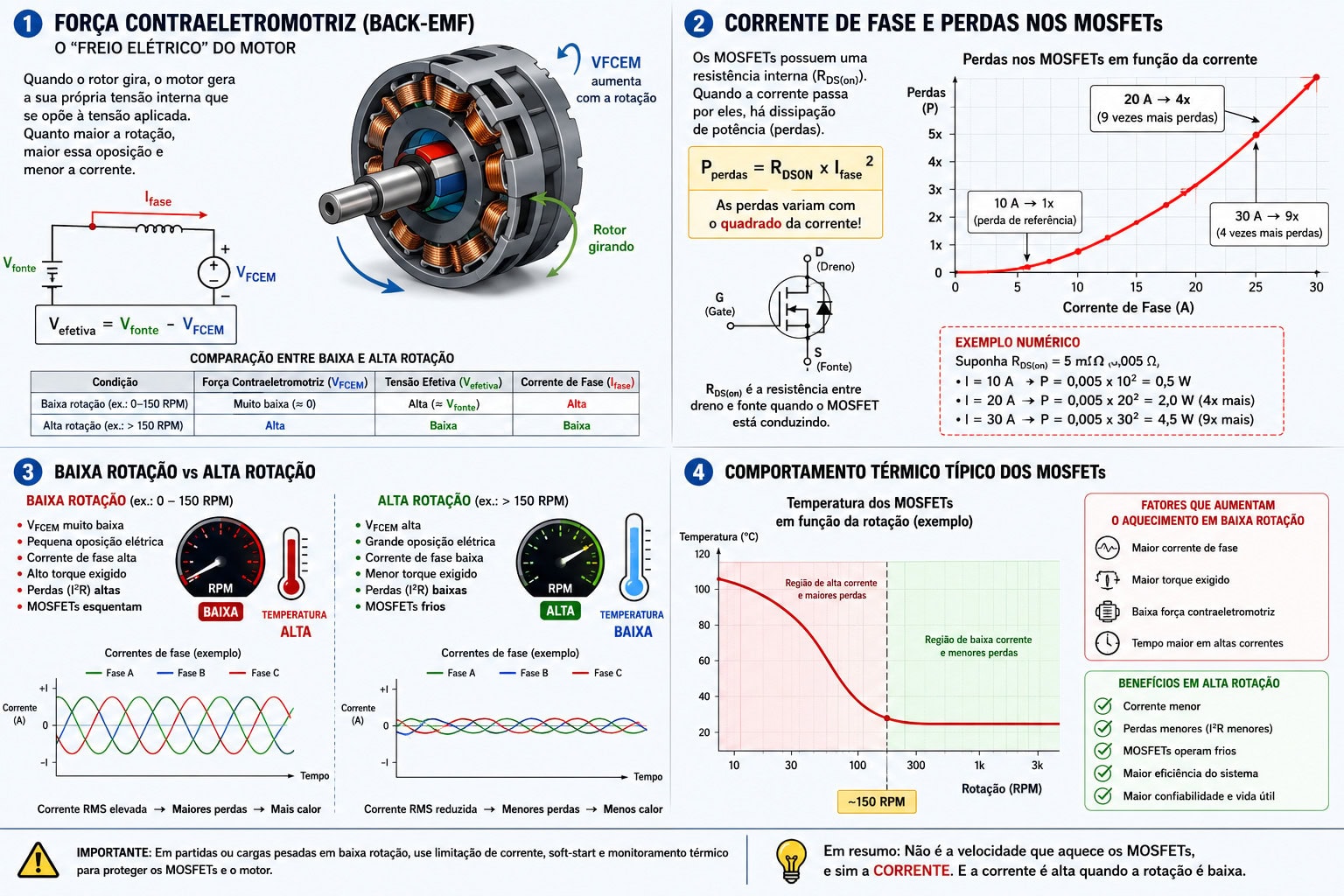
Esse comportamento está profundamente ligado a um fenômeno chamado força contraeletromotriz, também conhecida como Back-EMF (Back Electromotive Force). Além disso, o aquecimento dos MOSFETs possui relação direta com a corrente elétrica que circula pelas fases do motor, e essa corrente influencia as perdas internas dos transistores de forma quadrática.
Neste artigo vamos entender, de forma didática, como a força contraeletromotriz atua dentro do motor, por que a corrente é maior em baixas rotações, e como isso faz os MOSFETs dissiparem mais potência térmica. Também veremos por que muitos motores, acima de determinada rotação — como 150 RPM no exemplo discutido — passam a operar com temperatura praticamente ambiente.
O primeiro conceito fundamental para compreender esse comportamento é justamente a força contraeletromotriz, tema que veremos na próxima seção.
Força Contraeletromotriz: O “Freio Elétrico” Natural do Motor
Para entender por que os MOSFETs aquecem menos em rotações elevadas, primeiro precisamos compreender um dos fenômenos mais importantes dos motores elétricos: a força contraeletromotriz.
Quando aplicamos tensão em um enrolamento de motor, uma corrente elétrica começa a circular pela bobina. Essa corrente cria um campo magnético, e o campo magnético gera movimento mecânico. Até aqui temos o princípio básico de funcionamento de praticamente qualquer motor elétrico.
Porém, existe um detalhe extremamente importante: quando o rotor começa a girar dentro do campo magnético, o próprio motor passa a se comportar parcialmente como um gerador elétrico.
Esse efeito faz surgir uma tensão interna oposta à tensão aplicada pela fonte. Essa tensão recebe o nome de força contraeletromotriz.
O termo “contra” existe porque essa tensão atua em oposição à tensão que originalmente está tentando empurrar corrente para dentro do enrolamento.
Em termos simplificados:
- A fonte tenta empurrar corrente para o motor.
- O motor girando tenta dificultar essa corrente.
- Quanto maior a velocidade do motor, maior essa oposição elétrica.
Podemos representar isso conceitualmente como:
\[V_{efetiva}=V_{fonte}-V_{FCEM}\]
Onde:
- \(V_{fonte}\) é a tensão aplicada pelo driver.
- \(V_{FCEM}\) é a força contraeletromotriz.
- \(V_{efetiva}\) é a tensão realmente responsável pela circulação da corrente.
No instante em que o motor está parado, a força contraeletromotriz é praticamente zero, porque não existe movimento mecânico suficiente para gerar essa tensão oposta.
Isso significa que quase toda a tensão da fonte fica disponível sobre os enrolamentos.
Como consequência, a corrente tende a subir bastante.
Podemos imaginar isso como uma situação semelhante a um curto parcial controlado pela resistência dos enrolamentos.
Em motores Brushless, por exemplo, a resistência elétrica dos enrolamentos costuma ser muito baixa, frequentemente na faixa de mili-ohms ou poucos ohms. Isso permite correntes extremamente elevadas durante partidas ou baixas rotações.
À medida que o rotor acelera, a força contraeletromotriz cresce proporcionalmente à velocidade angular do motor.
Em muitos motores, podemos representar isso por:
\[V_{FCEM}=K_e\cdot\omega\]
Onde:
- \(K_e\) é a constante elétrica do motor.
- \(\omega\) representa a velocidade angular do rotor.
Isso significa que quanto maior a rotação:
- maior a força contraeletromotriz;
- menor a tensão efetiva nos enrolamentos;
- menor a corrente de fase;
- menor o esforço elétrico sobre os MOSFETs.
É exatamente por isso que muitos motores apresentam forte aquecimento durante partidas, arrancadas ou funcionamento em baixa velocidade, mas tornam-se muito mais frios quando atingem velocidades mais elevadas.
Em sistemas bem dimensionados, pode ocorrer exatamente o comportamento citado no diálogo original: acima de certa rotação, como 150 RPM, a corrente cai tanto que os MOSFETs passam a operar praticamente em temperatura ambiente.
Corrente de Fase e as Perdas nos MOSFETs: Por Que o Aquecimento Cresce Tão Rapidamente
Agora que entendemos que a força contraeletromotriz reduz naturalmente a corrente em altas rotações, podemos compreender o motivo principal do aquecimento dos MOSFETs: as perdas resistivas internas dos transistores.
Embora os MOSFETs sejam extremamente eficientes, eles não são componentes ideais. Quando entram em condução, existe uma pequena resistência interna entre o dreno (Drain) e a fonte (Source). Essa resistência é chamada de \(R_{DS(on)}\).
Mesmo sendo pequena, essa resistência ainda dissipa potência quando a corrente elétrica atravessa o transistor.
As perdas por condução podem ser representadas por:
\[P_{MOSFET}=R_{DS(on)}\cdot I_{fase}^2\]
Essa equação é um dos pontos mais importantes para compreender o aquecimento em drivers de motores.
Observe cuidadosamente que a corrente está elevada ao quadrado.
Isso significa que o aquecimento não cresce de forma linear. Ele cresce quadraticamente.
Na prática isso produz um efeito extremamente agressivo.
Imagine um MOSFET conduzindo:
- 5 A de corrente
- depois 10 A de corrente
Muitas pessoas imaginam que as perdas dobrariam. Porém:
- em 5 A temos:
\[
5^2 = 25
\]
- em 10 A temos:
\[
10^2 = 100
\]
Ou seja, dobrar a corrente fez as perdas aumentarem quatro vezes.
Esse é o principal motivo pelo qual pequenas reduções na corrente provocam enormes reduções na temperatura dos MOSFETs.
É exatamente isso que acontece quando o motor ganha velocidade.
Com o aumento da força contraeletromotriz:
- a corrente diminui;
- as perdas quadráticas diminuem drasticamente;
- a dissipação térmica cai rapidamente.
Em baixa rotação ocorre o pior cenário possível:
- baixa força contraeletromotriz;
- corrente elevada;
- perdas quadráticas altas;
- grande geração de calor.
Além disso, em baixas velocidades o motor frequentemente exige mais torque para vencer:
- atrito mecânico;
- inércia;
- carga aplicada;
- peso;
- resistência do sistema.
Maior torque normalmente significa maior corrente.
Em motores BLDC, PMSM (Permanent Magnet Synchronous Motor) e motores trifásicos em geral, o torque costuma ser aproximadamente proporcional à corrente de fase:
\[T\propto I_{fase}\]
Isso cria uma situação interessante:
- baixa rotação → maior demanda de corrente → maior torque → maior aquecimento;
- alta rotação → menor corrente → menores perdas → MOSFETs mais frios.
Outro detalhe importante é que muitos sistemas de controle utilizam PWM (Pulse Width Modulation). Em baixas rotações, o controlador frequentemente mantém ciclos de condução mais agressivos para sustentar torque, aumentando ainda mais a corrente RMS nos MOSFETs.
Por isso, em projetos reais de eletrônica de potência, é comum observar:
- MOSFETs extremamente quentes em partida;
- forte aquecimento em baixas RPM;
- redução significativa da temperatura conforme a velocidade aumenta;
- operação quase fria em regime permanente de alta rotação.
Esse comportamento não é defeito do circuito. Na maioria das vezes, trata-se apenas da física natural do motor e da relação entre corrente, força contraeletromotriz e perdas resistivas nos semicondutores.
Por Que Acima de Certas RPM os MOSFETs Quase Não Esquentam?
Depois de compreender a força contraeletromotriz e as perdas quadráticas nos MOSFETs, fica muito mais fácil entender um comportamento frequentemente observado em motores Brushless: em determinadas rotações o sistema praticamente “entra em equilíbrio térmico” e os MOSFETs deixam de aquecer significativamente.
No exemplo discutido inicialmente, foi observado que acima de aproximadamente 150 RPM os MOSFETs permanecem praticamente em temperatura ambiente. Isso pode parecer surpreendente, mas é uma consequência direta do funcionamento eletromagnético do motor.
Quando o motor atinge uma rotação mais elevada, a força contraeletromotriz aumenta consideravelmente. Essa tensão interna passa então a “ajudar” o circuito, limitando naturalmente a corrente consumida pelas fases.
Nesse ponto ocorre algo extremamente importante: o motor passa a precisar de muito menos corrente para continuar girando.
Isso acontece porque a maior parte da energia mecânica necessária para manter a rotação já foi transferida durante a aceleração inicial. Em regime permanente, o sistema normalmente precisa apenas compensar:
- atrito mecânico;
- pequenas perdas magnéticas;
- perdas aerodinâmicas;
- carga residual aplicada ao eixo.
Como consequência, a corrente RMS das fases cai drasticamente.
E como vimos anteriormente, pequenas reduções na corrente produzem enormes reduções térmicas devido à relação quadrática das perdas:
\[P\propto I^2\]
Esse efeito é tão forte que, em muitos sistemas:
- reduzir a corrente pela metade;
- significa reduzir as perdas para apenas 25%.
Em projetos bem dimensionados, o resultado é impressionante:
- MOSFETs quase frios;
- dissipadores pouco exigidos;
- baixa temperatura do PCB;
- maior eficiência energética;
- menor estresse nos componentes;
- maior vida útil do sistema.
Outro ponto importante é que, em alta rotação, o tempo relativo em que os MOSFETs permanecem na região linear também tende a ser menor em sistemas adequadamente controlados.
Isso é importante porque MOSFETs dissipam muito calor quando operam parcialmente conduzindo corrente e parcialmente bloqueando tensão simultaneamente.
Os dois estados mais eficientes para um MOSFET são:
- totalmente ligado;
- totalmente desligado.
Durante as transições de chaveamento surgem perdas chamadas perdas de switching.
Em muitos sistemas BLDC, as perdas por condução em baixa rotação acabam sendo dominantes, enquanto em altas rotações as perdas de chaveamento passam a se tornar relativamente mais relevantes. Mesmo assim, como a corrente diminui bastante, o aquecimento total frequentemente continua menor.
Outro fenômeno importante é que motores em baixa velocidade frequentemente operam próximos de situações chamadas de “stall” ou semi-stall.
“Stall” significa rotor travado ou quase travado.
Nessas condições:
- a força contraeletromotriz praticamente desaparece;
- a corrente sobe drasticamente;
- os MOSFETs podem aquecer em poucos segundos.
Esse é um dos cenários mais críticos em eletrônica de potência.
Por isso muitos drivers modernos implementam:
- limitação de corrente;
- proteção térmica;
- controle vetorial;
- soft-start;
- monitoramento de temperatura;
- proteção contra sobrecorrente.
No fim, o comportamento observado no diálogo original representa um excelente exemplo prático da interação entre:
- eletromagnetismo;
- eletrônica de potência;
- teoria de motores elétricos;
- física dos semicondutores;
- dissipação térmica.
Entender esses fenômenos é fundamental para projetar:
- ESCs;
- inversores trifásicos;
- drivers BLDC;
- controladores industriais;
- sistemas automotivos;
- drones;
- robôs;
- acionamentos de alto desempenho.
É justamente essa relação entre corrente, força contraeletromotriz e perdas térmicas que explica por que um motor pode consumir muito mais energia e aquecer fortemente em baixas rotações, mas operar de forma extremamente eficiente e fria em velocidades mais elevadas.
Conclusão: O Aquecimento dos MOSFETs Está Mais Ligado à Corrente do Que à Velocidade
Muitas pessoas associam intuitivamente maior velocidade do motor com maior esforço eletrônico e maior aquecimento dos MOSFETs. Porém, ao analisarmos o funcionamento físico do sistema, percebemos que o fator dominante no aquecimento não é diretamente a rotação, mas sim a corrente elétrica que circula pelas fases do motor.
Em baixas rotações, a força contraeletromotriz ainda é pequena. Isso significa que existe pouca oposição natural à corrente elétrica aplicada aos enrolamentos. Como consequência, a corrente de fase cresce significativamente, principalmente durante partidas, acelerações ou condições de carga elevada.
Essa corrente elevada produz grandes perdas térmicas nos MOSFETs devido à resistência interna (R_{DS(on)}). Como as perdas variam com o quadrado da corrente, mesmo pequenos aumentos de corrente podem gerar um crescimento extremamente rápido da dissipação térmica.
O resultado prático é facilmente observado:
- motor em baixa RPM → MOSFETs aquecem fortemente;
- motor em alta RPM → MOSFETs operam mais frios.
Quando o motor ganha velocidade, a força contraeletromotriz aumenta e passa a atuar como uma espécie de “freio elétrico natural”, reduzindo a corrente consumida pelas fases. Com menos corrente, as perdas resistivas diminuem drasticamente, permitindo que os MOSFETs trabalhem em temperaturas muito menores.
É por isso que muitos sistemas Brushless apresentam comportamento semelhante ao relatado no diálogo original: acima de determinada rotação, como 150 RPM, o conjunto eletrônico praticamente estabiliza termicamente e pode permanecer próximo da temperatura ambiente.
Esse conhecimento é extremamente importante no desenvolvimento de:
- drivers BLDC;
- inversores trifásicos;
- ESCs para drones;
- sistemas automotivos;
- robótica;
- acionamentos industriais;
- eletrônica de potência em geral.
Compreender a relação entre força contraeletromotriz, corrente de fase e perdas nos semicondutores permite projetar sistemas mais eficientes, seguros e duráveis.
Além disso, esse entendimento ajuda a evitar interpretações incorretas durante testes práticos. Muitas vezes o aquecimento observado em baixas rotações não representa necessariamente um defeito no circuito, mas sim uma consequência natural da física envolvida no funcionamento do motor elétrico e dos dispositivos semicondutores de potência.
