Os amplificadores Classe D se destacam pela sua alta eficiência e crescente popularidade em sistemas de áudio, tanto profissionais quanto de consumo. Este artigo aborda os principais aspectos de seu funcionamento, comparando topologias, analisando perdas em MOSFETs e detalhando as causas de distorção e interferência eletromagnética. A partir de uma tradução livre e resumo do application note AN-1071 – Class D Audio Amplifier Basics por Jun Honda & Jonathan Adams, da International Rectifier, discutimos as soluções para desafios como “bus pumping” e distorções relacionadas ao dead time, destacando a importância de otimizações no design para garantir alta qualidade de áudio com baixo consumo energético.
O que é um Amplificador de Áudio Classe D – Teoria de Operação
Um amplificador de áudio Classe D é um amplificador de comutação ou PWM (modulação por largura de pulso). Ele é bastante eficiente, chegando a uma eficiência de 90-95%, ao contrário dos amplificadores lineares (Classes A, B e AB), que têm eficiência muito menor.
Classificação de Amplificadores
Antes de entender o funcionamento da Classe D, é útil revisar como os amplificadores de outras classes operam:
- Classe A: O dispositivo de saída conduz continuamente durante todo o ciclo do sinal, o que resulta em baixa distorção e alta linearidade. No entanto, a eficiência é muito baixa, em torno de 20%, pois há fluxo de corrente o tempo todo, independentemente de haver sinal de entrada.
- Classe B: Aqui, os dispositivos de saída conduzem durante metade do ciclo do sinal. Quando um transistor está ligado, o outro está desligado. Isso melhora a eficiência (em torno de 50%), mas há distorção no ponto de cruzamento entre os dois transistores.
- Classe AB: Combina os princípios das classes A e B. Os dois dispositivos conduzem por mais de metade do ciclo, mas menos que um ciclo completo. Isso melhora a linearidade em comparação à Classe B, mas a eficiência ainda fica por volta de 50%.
- Classe D: Diferentemente das classes anteriores, na Classe D, os dispositivos de saída operam como chaves, ligando e desligando completamente. Isso minimiza a dissipação de energia e aumenta a eficiência. O sinal de áudio é modulado em um sinal PWM, que é amplificado e depois filtrado para remover a componente de alta frequência.
Operação de um Amplificador Classe D
No coração do amplificador Classe D está o conceito de modulação por largura de pulso (PWM). O processo é o seguinte:
- Entrada de áudio: O sinal analógico de entrada é uma onda senoidal típica de 20 Hz a 20 kHz.
- Comparação com onda triangular: Esse sinal de áudio é comparado a uma onda triangular de alta frequência, o que gera um sinal PWM. A largura dos pulsos resultantes varia de acordo com a amplitude do sinal de áudio.
- Comutação dos transistores: O sinal PWM controla os transistores da etapa de potência, alternando-os entre totalmente “ligado” e “desligado”. Isso minimiza as perdas, pois os transistores não operam na região linear (onde a maior parte da energia seria dissipada como calor).
- Filtro passa-baixa: Após a comutação, o sinal de saída contém tanto o áudio amplificado quanto a alta frequência do PWM. Um filtro passa-baixa remove essa alta frequência, restando apenas o sinal de áudio amplificado.
Por que a Classe D é mais eficiente?
A eficiência dos amplificadores de Classe D decorre do fato de que os transistores não dissipam energia quando estão totalmente ligados ou desligados. Em um amplificador linear, os transistores regulam continuamente a tensão de saída, o que resulta em quedas de tensão e aquecimento. Já na Classe D, essa regulação é feita pela largura dos pulsos PWM, com o transistor funcionando apenas como uma chave que ou está completamente aberta ou fechada.
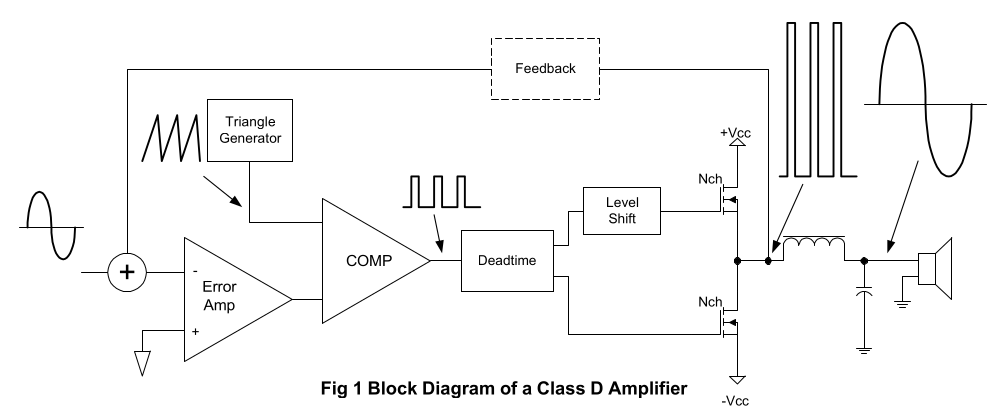
Diagrama Básico de um Amplificador Classe D
O circuito típico de um amplificador Classe D envolve os seguintes componentes principais:
- Gerador de onda triangular: Responsável por gerar o sinal de comparação PWM.
- Modulador PWM: Compara o sinal de entrada com a onda triangular, criando um sinal PWM.
- Etapa de comutação: Transistores que amplificam o sinal PWM.
- Filtro passa-baixa: Remove as frequências altas do PWM, recuperando o áudio original.
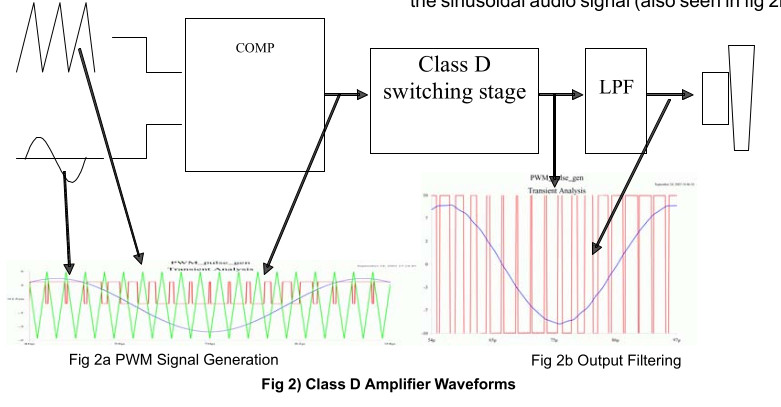
Formas de Onda de um Amplificador Classe D
- Sinal PWM: A largura dos pulsos corresponde à amplitude do sinal de áudio.
- Sinal filtrado: Após o filtro passa-baixa, o sinal PWM é transformado de volta em uma onda senoidal.
Comparação de Topologias – Amplificadores Lineares vs. Classe D
A principal diferença entre amplificadores lineares (Classes A, B e AB) e amplificadores Classe D está na eficiência e no método de amplificação. Os amplificadores Classe D foram desenvolvidos para resolver os problemas de eficiência inerentes aos amplificadores lineares.
Diferenças Fundamentais
- Eficiência:
- Amplificadores Lineares (Classe A, B e AB): A eficiência de um amplificador linear é limitada pela necessidade de manter os transistores de saída em operação constante na região ativa (linear). Para a Classe A, a eficiência é a menor, em torno de 20%, já que a corrente flui mesmo quando não há sinal de áudio. A Classe B é mais eficiente, chegando a 50%, mas apresenta distorção de cruzamento. A Classe AB equilibra distorção e eficiência, com uma eficiência típica de 50%.
- Amplificadores Classe D: Os amplificadores Classe D são conhecidos pela eficiência extremamente alta, podendo chegar a 90-95%. Isso ocorre porque os transistores de saída operam como chaves — estão totalmente ligados ou desligados, o que minimiza a dissipação de potência.
- Forma de Sinal e Operação:
- Amplificadores Lineares: Os amplificadores lineares modulam diretamente a amplitude da corrente e tensão nos transistores de saída. O sinal de áudio permanece no domínio analógico durante todo o processo. Isso garante uma boa linearidade, mas a grande queda de tensão nos transistores durante a condução é responsável pela baixa eficiência.
- Amplificadores Classe D: Aqui, o sinal de entrada é convertido em um sinal de modulação por largura de pulso (PWM). Os transistores não modulam diretamente o sinal de áudio; eles operam em estados de chaveamento. Isso reduz as perdas de potência, pois há pouca ou nenhuma dissipação quando os transistores estão completamente ligados ou desligados.
Diagramas e Diferenças Estruturais
Nos amplificadores lineares, como os de Classe AB, a topologia básica é composta por transistores em configuração push-pull que modulam diretamente a saída de acordo com o sinal de entrada. Esse método, apesar de eficiente em termos de linearidade e baixa distorção, apresenta perdas de potência significativas.
Nos amplificadores Classe D, a topologia geralmente envolve:
- Entrada de áudio analógico: O sinal de áudio é comparado a uma onda triangular de alta frequência, criando o sinal PWM.
- Estágio de comutação: Os transistores são controlados pelo sinal PWM, alternando entre estados ligados e desligados. Aqui, os transistores funcionam como chaves de potência.
- Filtro passa-baixa: Esse filtro remove a alta frequência do PWM, resultando na recuperação do sinal de áudio amplificado.
Relação entre Ganho e Tensão de Barramento
Outra diferença significativa está no ganho:
- Nos amplificadores lineares, o ganho é independente da variação da tensão de alimentação. Isso significa que a tensão de alimentação flutua, mas a saída permanece estável, resultando em uma boa rejeição de variações na fonte de alimentação (alto PSRR – Power Supply Rejection Ratio).
- Nos amplificadores Classe D, o ganho está diretamente relacionado à tensão de alimentação. Quando a tensão de barramento (bus voltage) varia, o ganho também varia, o que significa que o PSRR para amplificadores Classe D é tipicamente 0 dB. No entanto, feedback pode ser utilizado para compensar variações na tensão do barramento e melhorar a linearidade.
Fluxo de Energia
- Nos amplificadores lineares, a energia flui do suprimento para a carga continuamente, com perdas de calor significativas nos dispositivos de saída.
- Nos amplificadores Classe D em topologia de ponte completa (full-bridge), o fluxo de energia também é unidirecional, semelhante aos amplificadores lineares. Entretanto, nos amplificadores Classe D em meia ponte (half-bridge), o fluxo de energia pode ser bidirecional, o que leva ao fenômeno conhecido como “bus pumping”. Esse efeito ocorre quando a energia retorna da carga para o barramento de alimentação, principalmente em baixas frequências de áudio (abaixo de 100 Hz).
Eficiência: Linear vs. Classe D
A eficiência pode ser visualizada nos gráficos típicos de eficiência vs. potência de saída:
- Amplificadores Lineares: A eficiência é linearmente limitada pela quantidade de dissipação de calor nos transistores.
- Amplificadores Classe D: A eficiência é dramaticamente superior em quase toda a faixa de potência de saída, já que as perdas de calor são minimizadas.
Tabela Comparativa
| Característica | Amplificadores Lineares (Classe AB) | Amplificadores Classe D |
|---|---|---|
| Eficiência | ~50% | 90-95% |
| Método de Operação | Analógico (sinal contínuo) | Chaveamento (PWM) |
| Dissipação de Calor | Alta | Baixa |
| PSRR (Rejeição à Variação de Fonte) | Elevado | 0 dB |
| Fluxo de Energia | Unidirecional (do suprimento à carga) | Bidirecional (no half-bridge) |
| Distância entre Transistores | Menos dependente do tempo de chaveamento | Dependente da frequência PWM |
Analogia com um Conversor Buck Síncrono
Os amplificadores Classe D compartilham uma semelhança estrutural e funcional notável com os conversores buck síncronos (ou redutores de tensão). Embora as aplicações sejam diferentes, ambos os circuitos utilizam topologias semelhantes e operam com base em princípios de comutação de alta frequência para controlar a saída de forma eficiente.
Comparação Estrutural
Tanto os amplificadores Classe D quanto os conversores buck síncronos utilizam dois transistores (geralmente MOSFETs) que operam de maneira complementar, alternando entre os estados ligado e desligado. A chave aqui é a alternância dos transistores para controlar a tensão ou corrente de saída.
No caso do conversor buck síncrono, o objetivo é reduzir a tensão de entrada (geralmente DC) para um valor mais baixo de tensão DC. Já no amplificador Classe D, o objetivo é modular um sinal de áudio (AC) e amplificá-lo, mantendo alta eficiência e baixa distorção.
Topologia Básica
A topologia de um conversor buck síncrono envolve:
- Transistores MOSFETs: Dois MOSFETs, um na parte alta (high-side) e outro na parte baixa (low-side), alternam de acordo com o sinal de controle.
- Indutor e Capacitor: Eles formam um filtro que suaviza a saída para obter uma tensão DC estável (no conversor buck) ou para recuperar o sinal de áudio (no amplificador Classe D).
De maneira semelhante, um amplificador Classe D também emprega:
- MOSFETs que chaveiam rapidamente, controlados por um sinal de PWM (modulação por largura de pulso).
- Filtro passa-baixa composto por indutores e capacitores para eliminar as componentes de alta frequência da portadora PWM e restaurar o sinal de áudio.
Diferenças Principais
- Sinal de Referência:
- No conversor buck síncrono, o sinal de referência é uma tensão fixa que define o nível de saída desejado.
- No amplificador Classe D, o sinal de referência é o próprio sinal de áudio, que varia continuamente. Isso significa que, enquanto o ciclo de trabalho (duty cycle) de um conversor buck síncrono tende a ser estável (dependendo da carga), o ciclo de trabalho de um amplificador Classe D varia conforme as flutuações do áudio.
- Direção da Corrente:
- No conversor buck síncrono, a corrente flui apenas em uma direção — do suprimento para a carga.
- No amplificador Classe D, em topologias de meia ponte, a corrente pode fluir em ambas as direções, o que pode causar o fenômeno de bus pumping, onde a energia retorna para o barramento de alimentação durante certas condições de carga, principalmente em baixas frequências.
- Modulação e Controle:
- Conversor Buck Síncrono: A largura dos pulsos é controlada por um loop de feedback que compara a tensão de saída com a tensão de referência.
- Amplificador Classe D: A modulação por largura de pulso é controlada pelo sinal de áudio, que varia continuamente. Isso significa que o ciclo de trabalho está sempre mudando em resposta ao sinal de entrada, e o controle da comutação é mais dinâmico.
Semelhanças Chave
- Chaveamento de Alta Frequência:
Ambos os circuitos utilizam transistores MOSFET que operam em alta frequência. Essa comutação rápida minimiza as perdas de energia, garantindo alta eficiência em ambas as aplicações. No caso do amplificador Classe D, essa eficiência é crucial para aplicações de áudio de alta potência. - Minimização de Perdas de Condução e Chaveamento:
Em ambos os circuitos, as perdas nos MOSFETs podem ser de dois tipos principais:- Perdas de condução: Determinadas pela resistência de condução do MOSFET (RDS(on)). Quanto menor for essa resistência, menores serão as perdas quando o transistor está ligado.
- Perdas de chaveamento: Relacionadas ao tempo que o transistor leva para alternar entre os estados ligado e desligado. MOSFETs com tempos de chaveamento rápidos são preferidos para minimizar essas perdas.
- Filtro de Saída:
Tanto no conversor buck quanto no amplificador Classe D, o filtro de saída (geralmente um filtro passa-baixa) desempenha um papel crucial. No conversor buck, ele suaviza a tensão DC para eliminar ondulações, enquanto no amplificador Classe D, ele remove a frequência de comutação alta (PWM), deixando apenas o sinal de áudio amplificado.
Diferença na Otimização dos MOSFETs
No conversor buck síncrono, a otimização dos MOSFETs varia entre o lado alto (high-side) e o lado baixo (low-side):
- O MOSFET do lado alto é otimizado para baixa resistência RDS(on), já que ele passa a maior parte do tempo conduzindo.
- O MOSFET do lado baixo é otimizado para baixa carga de gate (Qg), pois ele passa a maior parte do tempo alternando.
Já no amplificador Classe D, ambos os MOSFETs (lado alto e lado baixo) têm otimizações semelhantes, pois o ciclo de trabalho varia continuamente de acordo com o sinal de áudio.
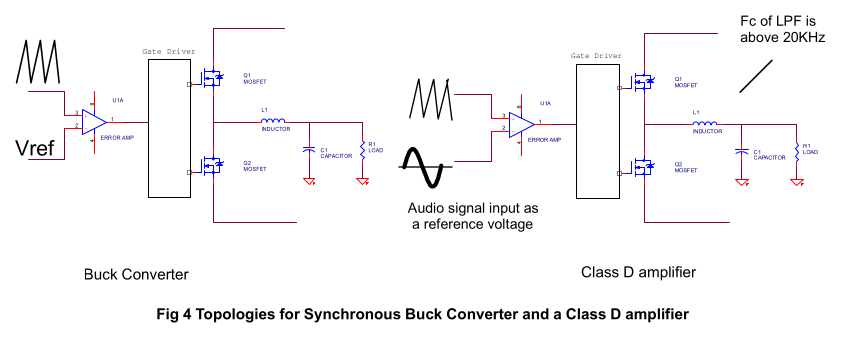
Diagrama Comparativo
O diagrama abaixo (baseado no documento) exemplifica a topologia comparativa entre um conversor buck síncrono e um amplificador Classe D:
- Conversor Buck Síncrono:
- Tensão de referência constante (Vref).
- MOSFETs alternando em função de um loop de feedback para manter a tensão de saída.
- Indutor e capacitor filtram o ripple, gerando uma saída DC estável.
- Amplificador Classe D:
- Sinal de áudio variável como referência.
- MOSFETs alternando de acordo com o PWM gerado a partir da comparação do áudio com uma onda triangular.
- Filtro passa-baixa recupera o áudio amplificado.
Essa analogia ajuda a entender como o conceito de chaveamento em alta frequência e filtragem funciona de forma semelhante em ambos os casos, embora os objetivos finais sejam diferentes. O amplificador Classe D aplica esses princípios para alcançar eficiência e qualidade de áudio, enquanto o conversor buck síncrono visa regular tensões com eficiência.
Perdas de Potência em MOSFETs
As perdas de potência em amplificadores Classe D podem ser divididas em três categorias principais:
- Perdas de chaveamento (Psw).
- Perdas de condução (Pcond).
- Perdas na ativação do gate (Pgd).
Vamos explorar cada uma dessas categorias em detalhes, apresentando as fórmulas e explicando seus componentes.
1. Perdas Totais no MOSFET (PTOTAL)
A equação geral para as perdas totais nos MOSFETs de um amplificador Classe D é dada por:
\[
P_{\text{TOTAL}} = P_{\text{sw}} + P_{\text{cond}} + P_{\text{gd}}
\]
Onde:
- \( P_{\text{sw}} \) são as perdas de chaveamento.
- \( P_{\text{cond}} \) são as perdas de condução.
- \( P_{\text{gd}} \) são as perdas de acionamento do gate.
Vamos ver como cada uma dessas perdas é calculada.
2. Perdas de Chaveamento (Psw)
As perdas de chaveamento são relacionadas ao tempo que o MOSFET leva para alternar entre os estados de ligado e desligado. Como os MOSFETs não são chaves ideais (não ligam e desligam instantaneamente), existe um tempo de transição durante o qual o MOSFET está parcialmente ligado, dissipando potência.
A fórmula para as perdas de chaveamento é:
\[
P_{\text{sw}} = f_{\text{PWM}} \cdot V_{\text{BUS}} \cdot I_{\text{D}} \cdot (t_{\text{r}} + t_{\text{f}}) + f_{\text{PWM}} \cdot C_{\text{OSS}} \cdot V_{\text{BUS}}^2
\]
Onde:
- \( f_{\text{PWM}} \) é a frequência de comutação PWM.
- \( V_{\text{BUS}} \) é a tensão do barramento de alimentação (bus voltage).
- \( I_{\text{D}} \) é a corrente de drenagem (drain current) do MOSFET.
- \( t_{\text{r}} \) é o tempo de subida (rise time) do MOSFET, ou seja, o tempo que o MOSFET leva para ligar totalmente.
- \( t_{\text{f}} \) é o tempo de descida (fall time), o tempo necessário para desligar totalmente.
- \( C_{\text{OSS}} \) é a capacitância parasita de saída do MOSFET (output capacitance).
Descrição dos Parâmetros:
- Frequência de chaveamento (fPWM): Quanto maior a frequência de comutação, maiores serão as perdas de chaveamento. A frequência PWM determina com que rapidez os MOSFETs alternam entre os estados ligado/desligado.
- Tensão do barramento (VBUS): A tensão de alimentação diretamente afeta as perdas de chaveamento. Tensão mais alta resulta em maiores perdas.
- Corrente de drenagem (ID): A corrente que flui através do MOSFET durante a operação. Quanto maior for a corrente, maiores serão as perdas de chaveamento.
- Tempos de subida e descida (tr, tf): Esses tempos determinam a duração em que o MOSFET está em uma condição parcialmente ligada, onde a dissipação de potência é maior. Reduzir esses tempos resulta em menores perdas.
- Capacitância de saída (COSS): Refere-se à carga armazenada entre o dreno e a fonte (drain-source) do MOSFET. Essa capacitância precisa ser carregada e descarregada a cada ciclo de comutação, contribuindo para as perdas.
3. Perdas de Condução (Pcond)
As perdas de condução ocorrem quando o MOSFET está totalmente ligado e há corrente fluindo através de sua resistência de condução \( R_{\text{DS(on)} }\). A potência dissipada devido à resistência interna do MOSFET é dada por:
\[
P_{\text{cond}} = \frac{P_{\text{o}}}{R_{\text{L}}} \cdot R_{\text{DS(on)}}
\]
Onde:
- \( P_{\text{o}} \) é a potência de saída desejada no amplificador.
- \( R_{\text{L}} \) é a resistência de carga (load resistance).
- \( R_{\text{DS(on)} }\) é a resistência de condução do MOSFET quando ele está ligado.
Descrição dos Parâmetros:
- Potência de saída (Po): Refere-se à potência de áudio entregue à carga (alto-falante). A quantidade de potência entregue afeta diretamente as perdas de condução.
- Resistência de carga (RL): Refere-se à impedância do alto-falante ou carga conectada ao amplificador. Baixas resistências de carga podem aumentar as perdas de condução.
- Resistência de condução (RDS(on)): Essa é uma característica do MOSFET. MOSFETs com menor RDS(on) são preferidos para reduzir as perdas de condução.
4. Perdas de Acionamento do Gate (Pgd)
As perdas no gate (acionamento do gate) ocorrem devido à energia necessária para carregar e descarregar a capacitância do gate do MOSFET a cada ciclo de comutação. A fórmula para essas perdas é:
\[
P_{\text{gd}} = f_{\text{PWM}} \cdot V_{\text{gs}} \cdot Q_{\text{g}}
\]
Onde:
- \( f_{\text{PWM}} \) é a frequência de chaveamento.
- \( V_{\text{gs}} \) é a tensão entre o gate e a fonte (gate-source voltage).
- \( Q_{\text{g}} \) é a carga total do gate (total gate charge).
Descrição dos Parâmetros:
- Frequência de chaveamento (fPWM): Como nas perdas de chaveamento, uma frequência mais alta de PWM aumentará as perdas no gate.
- Tensão gate-source (Vgs): A tensão necessária para acionar o MOSFET. Um valor mais alto de \( V_{\text{gs}} \) resulta em maiores perdas no gate.
- Carga do gate (Qg): A quantidade de carga necessária para alternar o MOSFET. MOSFETs com menor \( Q_{\text{g}} \) são preferidos para reduzir as perdas de acionamento do gate.
Resumo das Fórmulas:
- Perdas de chaveamento:
\[
P_{\text{sw}} = f_{\text{PWM}} \cdot V_{\text{BUS}} \cdot I_{\text{D}} \cdot (t_{\text{r}} + t_{\text{f}}) + f_{\text{PWM}} \cdot C_{\text{OSS}} \cdot V_{\text{BUS}}^2
\] - Perdas de condução:
\[
P_{\text{cond}} = \frac{P_{\text{o}}}{R_{\text{L}}} \cdot R_{\text{DS(on)}}
\] - Perdas de acionamento do gate:
\[
P_{\text{gd}} = f_{\text{PWM}} \cdot V_{\text{gs}} \cdot Q_{\text{g}}
\]
Essas fórmulas são essenciais para projetar um amplificador Classe D eficiente, otimizando a seleção dos MOSFETs e ajustando a frequência PWM para minimizar as perdas totais.
Half Bridge vs. Full Bridge
Os amplificadores Classe D podem ser projetados em diferentes configurações de ponte, sendo as mais comuns as topologias de meia ponte e ponte completa. Cada uma dessas configurações possui vantagens e desvantagens, dependendo da aplicação e do nível de desempenho desejado. A escolha entre essas duas topologias afeta diretamente o custo, a complexidade e a performance do amplificador.
1. Topologia de Meia Ponte (Half Bridge)
Na topologia de meia ponte, apenas dois transistores MOSFET são usados: um no lado alto (high-side) e outro no lado baixo (low-side). Essa é uma configuração relativamente simples e é usada frequentemente em aplicações de amplificação de potência moderada.
Características Principais:
- Número de MOSFETs: Apenas dois transistores (um no high-side e um no low-side) são necessários.
- Complexidade: Menor complexidade em comparação com a ponte completa.
- Custo: Mais econômica, pois requer menos componentes.
- Performance de áudio: Menor que a ponte completa, especialmente em termos de cancelamento de distorção harmônica e rejeição de ruído.
Desvantagem – Bus Pumping:
Uma desvantagem fundamental da topologia de meia ponte é o fenômeno conhecido como bus pumping. Esse efeito ocorre porque o fluxo de energia no amplificador Classe D de meia ponte é bidirecional. Em frequências de áudio muito baixas (abaixo de 100 Hz), parte da energia do amplificador pode retornar para o barramento de alimentação, elevando a tensão de barramento (bus voltage). Isso cria flutuações na tensão do barramento e pode causar distorções no sinal de áudio.
2. Topologia de Ponte Completa (Full Bridge)
A topologia de ponte completa (full bridge) é mais sofisticada e envolve o uso de quatro MOSFETs, organizados em dois pares complementares. Nessa configuração, dois transistores operam de forma cruzada para amplificar o sinal diferencialmente. Essa topologia é mais comum em amplificadores de alta potência, onde se busca um desempenho de áudio superior.
Características Principais:
- Número de MOSFETs: Quatro transistores são necessários, organizados em duas “pernas” (legs), cada uma contendo um MOSFET high-side e um MOSFET low-side.
- Complexidade: Mais complexa em termos de controle e layout, já que há mais componentes e a configuração envolve o controle de quatro transistores.
- Custo: Mais cara devido ao maior número de componentes.
- Performance de áudio: Melhor performance de áudio. A ponte completa permite o cancelamento de certos componentes de distorção harmônica (especialmente as harmônicas de segunda ordem) e proporciona melhor rejeição de ruídos.
Vantagens – Cancelamento de Distúrbios e Melhor Controle de Tensão:
- Sem bus pumping: Na topologia de ponte completa, a energia que retornaria ao barramento de alimentação na configuração meia ponte é utilizada de forma eficiente pela outra perna do circuito, evitando o problema de bus pumping.
- Melhor qualidade de áudio: O amplificador de ponte completa utiliza um sinal diferencial, o que melhora a rejeição de ruído e o cancelamento de distorções harmônicas de ordem par (como as de segunda ordem).
Comparação Direta: Half Bridge vs. Full Bridge
| Característica | Meia Ponte (Half Bridge) | Ponte Completa (Full Bridge) |
|---|---|---|
| Número de MOSFETs | 2 | 4 |
| Complexidade | Baixa | Alta |
| Custo | Mais econômica | Mais cara |
| Bus Pumping | Pode ocorrer | Não ocorre |
| Qualidade de áudio | Boa, mas menor que a full bridge | Superior, com melhor cancelamento de distorções |
| Cancelamento de distorção | Menor, com distorções de segunda ordem presentes | Melhoria no cancelamento de harmônicas de segunda ordem |
| Aplicações | Aplicações de potência moderada | Aplicações de alta potência |
Aplicações Típicas:
- Meia Ponte: Comumente usada em amplificadores de som portátil, sistemas de som automotivo e outras aplicações onde o custo e a simplicidade são mais importantes que a qualidade de áudio de alta fidelidade.
- Ponte Completa: Mais adequada para aplicações de áudio de alta potência, como sistemas de home theater, caixas de som profissionais e amplificadores de áudio para uso em estúdios, onde a qualidade do som é crítica.
A escolha entre as topologias de meia ponte e ponte completa depende muito dos requisitos de aplicação. A topologia de meia ponte é mais simples e barata, mas pode sofrer com o fenômeno de bus pumping em frequências mais baixas. Já a topologia de ponte completa oferece melhor qualidade de áudio, elimina o problema do bus pumping e permite o cancelamento de distorções harmônicas, mas a um custo mais alto e maior complexidade.
Principais Causas de Imperfeição em Amplificadores Classe D
Em um amplificador Classe D ideal, não haveria distorções, ruídos ou perdas, e a eficiência seria de 100%. No entanto, na prática, há várias imperfeições que afetam o desempenho, causando distorções e ruídos no sinal de áudio. Essas imperfeições estão diretamente relacionadas à natureza dos dispositivos de comutação, à velocidade de chaveamento e à interação com os componentes parasíticos do circuito.
1. Erros de Comutação no Sinal PWM
A modulação por largura de pulso (PWM) no amplificador Classe D é baseada na comparação entre o sinal de áudio e uma onda triangular de alta frequência. O processo de conversão do sinal de áudio para PWM, no entanto, pode introduzir não-linearidades. As principais causas dessas distorções incluem:
- Resolução limitada: A resolução do modulador PWM pode ser insuficiente, especialmente em frequências de áudio muito baixas, causando quantização inadequada.
- Jitter de temporização: Pequenas variações no momento exato em que a comparação ocorre podem resultar em diferenças mínimas, porém significativas, na largura dos pulsos PWM, afetando a fidelidade do sinal de saída.
Esses erros são uma fonte significativa de distorção em amplificadores Classe D e podem ser minimizados com moduladores de alta precisão.
2. Erros de Temporização dos Drivers de Gate
Os erros de temporização introduzidos pelos drivers de gate afetam o tempo exato em que os MOSFETs ligam e desligam. Esses erros são causados pelos tempos de chaveamento não ideais dos transistores e podem ser divididos em:
- Dead Time (tempo morto): Para evitar o shoot-through (quando ambos os MOSFETs high-side e low-side estão temporariamente ligados ao mesmo tempo, causando um curto-circuito), é inserido um tempo morto entre o desligamento de um MOSFET e o acionamento do outro. No entanto, esse tempo morto pode introduzir distorções significativas no sinal de áudio. Como o MOSFET permanece desligado durante o tempo morto, a saída do amplificador não acompanha o sinal PWM corretamente, o que gera distorção.
- Exemplo prático: Um tempo morto de apenas tens de nanossegundos pode resultar em mais de 1% de Distorção Harmônica Total (THD). Ajustes no tempo morto são essenciais para minimizar a distorção.
- tempos de subida e descida (tr e tf): Estes são os tempos que o MOSFET leva para ligar e desligar completamente. Se esses tempos não forem otimizados, podem causar perdas de potência adicionais e distorções no sinal.
3. Características Indesejadas dos MOSFETs
Mesmo com componentes de alta qualidade, os MOSFETs apresentam características físicas que não podem ser eliminadas, mas que podem ser minimizadas:
- Resistência RDS(on): A resistência de condução dos MOSFETs, (R_{\text{DS(on)} }), embora pequena, ainda pode causar perdas de condução significativas. Isso gera calor e reduz a eficiência geral do amplificador.
- Velocidade de comutação limitada: Os MOSFETs não chaveiam instantaneamente entre os estados ligado/desligado, o que gera perdas de chaveamento. Essas perdas aumentam com a frequência PWM, especialmente quando a frequência de chaveamento é muito alta para otimizar a resposta de áudio.
- Diodo de corpo: Quando o MOSFET está desligado, a corrente pode fluir pelo diodo de corpo, uma característica intrínseca do dispositivo. No entanto, o diodo de corpo tem um tempo de recuperação reversa significativo (Qrr), o que pode gerar picos de corrente indesejados e interferências eletromagnéticas (EMI). Isso se torna especialmente relevante em frequências altas de comutação.
4. Efeitos Parasitários
Componentes parasíticos no circuito, como indutâncias e capacitâncias em traços de PCB ou nos próprios componentes, podem gerar ressonâncias indesejadas. Essas ressonâncias, muitas vezes percebidas como oscilações na comutação, afetam a forma de onda de saída e contribuem para a distorção.
- Ressonância: Pode ocorrer quando há capacitâncias e indutâncias parasitas significativas nos trilhos de PCB ou no encapsulamento do MOSFET, levando à oscilação nas transições de comutação.
- Ruído de comutação: O ruído causado pelas rápidas mudanças de corrente nas transições de chaveamento pode ser acoplado indutivamente a outras partes do circuito, gerando interferências e distorção no sinal de áudio.
5. Flutuações na Tensão de Alimentação (Bus Voltage)
As variações na tensão de alimentação (barramento) causadas por fenômenos de bus pumping ou pela resistência interna da fonte de alimentação podem introduzir não-linearidades no ganho do amplificador. Como o ganho de um amplificador Classe D é proporcional à tensão do barramento, essas flutuações afetam diretamente o desempenho de áudio, causando distorções.
6. Não-Linearidade no Filtro Passa-Baixa
O filtro passa-baixa na saída de um amplificador Classe D é responsável por remover a portadora de alta frequência do sinal PWM, recuperando o áudio amplificado. No entanto, se o filtro não for bem projetado ou se os componentes não forem ideais (indutores com saturação ou capacitâncias parasíticas), isso pode introduzir não-linearidades no sinal final de áudio, gerando distorção.
Resumo das Principais Causas de Imperfeição:
- Não-linearidade no PWM: Erros na modulação do PWM devido à baixa resolução ou jitter de temporização.
- Erro de temporização dos drivers: Dead time e tempos de chaveamento introduzem distorção e perdas.
- Características dos MOSFETs: A resistência de condução e o tempo de recuperação do diodo de corpo afetam a eficiência e a qualidade do sinal.
- Efeitos parasíticos: Ressonâncias em componentes parasíticos e indutâncias/capacitâncias no PCB causam distorção.
- Flutuações na tensão de alimentação: Variações na tensão do barramento afetam diretamente o ganho e causam distorção.
- Não-linearidade no filtro de saída: Um filtro inadequado introduz distorção adicional no sinal de áudio.
As imperfeições discutidas podem ser minimizadas com técnicas de projeto avançadas, como o ajuste preciso do tempo morto, a seleção cuidadosa dos MOSFETs e a otimização do layout do PCB.
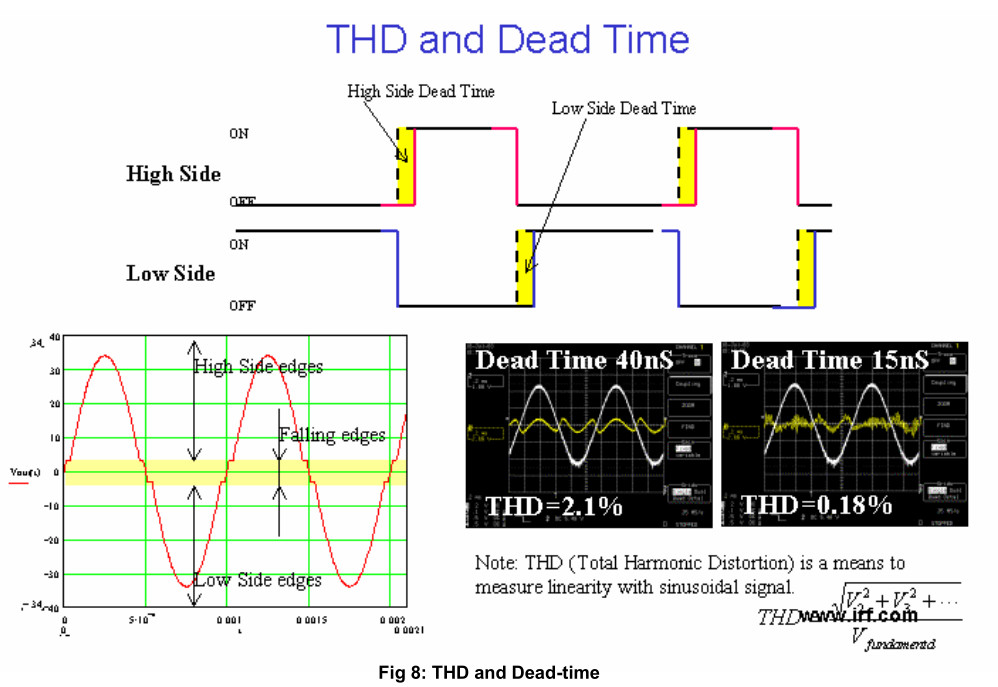
THD e Dead Time
A Distorção Harmônica Total (THD – Total Harmonic Distortion) e o Dead Time (tempo morto) estão intimamente relacionados no contexto de amplificadores Classe D. O dead time é introduzido para evitar uma condição destrutiva chamada shoot-through, mas, ao mesmo tempo, ele pode ser uma das maiores fontes de distorção em amplificadores Classe D.
1. O que é THD?
A Distorção Harmônica Total (THD) é uma métrica que quantifica a quantidade de distorção introduzida no sinal de saída de um amplificador. A THD é calculada comparando a potência das harmônicas indesejadas geradas pelo amplificador com a potência do sinal fundamental de saída. Quanto menor o valor de THD, mais fiel o sinal de saída é em relação ao sinal de entrada.
A fórmula geral para o cálculo de THD é:
\[
\text{THD} = \frac{\sqrt{V_2^2 + V_3^2 + V_4^2 + \cdots}}{V_1}
\]
Onde:
- \( V_1 \) é a amplitude da frequência fundamental (sinal desejado).
- \( V_2, V_3, V_4, \dots \) são as amplitudes das frequências harmônicas (componentes indesejadas).
As harmônicas são múltiplos da frequência fundamental que aparecem devido às não-linearidades no amplificador. Elas causam distorção auditiva no sinal de áudio amplificado, impactando a qualidade sonora.
2. O que é Dead Time?
O Dead Time (tempo morto) é um intervalo de tempo introduzido intencionalmente entre o desligamento de um MOSFET e o acionamento do outro no circuito de comutação. Isso é feito para evitar que ambos os MOSFETs do estágio de saída (high-side e low-side) conduzam simultaneamente, o que causaria um shoot-through — uma condição de curto-circuito que pode danificar seriamente os componentes.
Importância do Dead Time:
- Prevenção de Shoot-Through: Quando ambos os transistores conduzem ao mesmo tempo, a tensão do barramento (bus voltage) pode ser cortocircuitada, resultando em grandes correntes que podem destruir os MOSFETs.
- Efeito negativo na qualidade do áudio: Embora o dead time previna o shoot-through, ele também introduz distorções no sinal de áudio, já que, durante o tempo morto, nenhum dos MOSFETs está conduzindo, e o sinal de saída pode “ficar flutuante”, sem resposta ao PWM. Isso resulta em não-linearidades na forma de onda de saída, o que gera harmônicas indesejadas e aumenta a THD.
3. Efeitos do Dead Time na THD
A quantidade de dead time tem um impacto direto sobre o nível de distorção harmônica total (THD). Vamos entender como:
- Dead Time Curto: Um dead time muito curto pode levar ao shoot-through, mas quando bem ajustado, o dead time mais curto possível resulta em uma THD menor. Isso ocorre porque o tempo em que o sinal de saída não segue o PWM é reduzido, minimizando as não-linearidades.
- Dead Time Longo: Um dead time mais longo é mais seguro em termos de evitar o shoot-through, mas gera maior distorção. Durante o tempo morto, a corrente flui pelo diodo de corpo do MOSFET, e isso pode causar distorções significativas, especialmente em baixas correntes e altas frequências. A forma de onda de saída é deformada, e as componentes harmônicas se tornam mais pronunciadas.
Exemplo prático:
- Um dead time de 40 ns pode resultar em uma THD de 2%, o que é audível em sistemas de alta fidelidade.
- Se o dead time for reduzido para 15 ns, a THD pode ser reduzida para 0,2%, um valor muito mais aceitável para amplificadores de alta qualidade.
Isso ilustra a importância de otimizar o dead time para manter a THD dentro de níveis aceitáveis, sem comprometer a confiabilidade do circuito.
4. Análise dos Três Modos de Operação do Sinal de Saída
Existem três regiões de operação do estágio de saída de um amplificador Classe D, e cada uma delas é afetada de maneira diferente pelo dead time:
- Corrente de Saída Maior que a Corrente de Ripple do Indutor:
- Quando a corrente no estágio de saída é maior do que a corrente de ripple do indutor, a forma de onda de saída é influenciada pelo desligamento do MOSFET do lado alto (high-side). O dead time introduzido nesse ponto reduz a largura efetiva do PWM, diminuindo o ganho e gerando distorção.
- Corrente de Saída Invertida:
- Quando a corrente flui da carga para o amplificador, o MOSFET do lado baixo (low-side) domina a operação. O dead time afeta a transição de desligamento do lado baixo, levando novamente a uma redução no ganho e aumento da distorção.
- Região ZVS (Zero Voltage Switching):
- Quando a corrente de saída é menor que a corrente de ripple, o circuito opera na condição de ZVS (comutação em zero de tensão), e o efeito do dead time é mínimo. Nessa região, a distorção é reduzida porque a comutação ocorre quando a tensão é próxima de zero.
5. Como Minimizar o Impacto do Dead Time na THD
Existem várias técnicas para reduzir o impacto negativo do dead time na distorção harmônica:
- Ajuste fino do Dead Time: O dead time deve ser ajustado para o menor valor possível sem causar shoot-through. Em amplificadores Classe D de alta qualidade, o ajuste preciso do dead time é feito de maneira automática, em tempo real, para garantir que ele esteja sempre no ponto ideal.
- Dispositivos MOSFET de Alta Velocidade: A escolha de MOSFETs com tempos de chaveamento rápidos ajuda a reduzir a necessidade de dead time longo, minimizando a distorção sem arriscar o shoot-through.
- Técnicas de modulação avançadas: Algumas técnicas de modulação, como PWM de três níveis, podem reduzir a distorção causada pelo dead time, proporcionando uma transição mais suave entre os estados de comutação.
- THD é uma medida da distorção harmônica gerada no amplificador. Ela aumenta conforme o dead time é ampliado.
- Dead time é necessário para evitar shoot-through, mas se for excessivo, gera distorção no sinal de áudio.
- Reduzir o dead time para o menor valor possível sem comprometer a segurança do circuito resulta em menor THD e melhor qualidade de áudio.
- Otimizações no controle de dead time e na seleção de componentes são fundamentais para melhorar a performance de amplificadores Classe D de alta qualidade.
Medição de Desempenho de Áudio em Amplificadores Classe D
A medição do desempenho de áudio em amplificadores Classe D é crucial para avaliar a qualidade do som, incluindo parâmetros como distorção harmônica total (THD), ruído e fator de amortecimento. No entanto, a característica única dos amplificadores Classe D — a comutação de alta frequência — impõe desafios adicionais ao processo de medição.
1. Desafios nas Medições de Amplificadores Classe D
Os amplificadores Classe D operam utilizando sinais PWM de alta frequência, o que significa que o sinal de saída contém uma componente de alta frequência residual (a frequência de comutação) além do sinal de áudio amplificado. Isso cria dificuldades ao usar equipamentos de medição padrão de áudio, já que esses dispositivos podem não ser capazes de diferenciar entre o sinal de áudio e a frequência de comutação residual, resultando em leituras incorretas de distorção e ruído.
2. Equipamentos de Medição Recomendados
Para medir com precisão o desempenho de um amplificador Classe D, é necessário usar equipamentos especializados, geralmente com filtros passa-baixa para remover a frequência de comutação antes da análise do sinal de áudio.
Equipamentos Usados:
- Audio Precision (APx555 ou APx525): São exemplos de sistemas de medição de áudio de alta precisão que oferecem capacidades para medições em amplificadores Classe D. Esses equipamentos possuem filtros AES17 integrados, que são filtros passa-baixa especificamente projetados para remover a frequência de comutação, garantindo uma leitura precisa.
- HP 8903B: Outro analisador de áudio clássico que pode ser usado, mas com a adição de um filtro passa-baixa externo para eliminar a componente de comutação residual.
3. Filtros Necessários para Medição
O uso de filtros é essencial para separar a componente de áudio da frequência de comutação em amplificadores Classe D. Sem esses filtros, o analisador de áudio pode registrar os resíduos de comutação como parte do sinal de áudio, resultando em medições incorretas de THD e outros parâmetros.
Exemplo de Filtro Passa-Baixa
Um filtro típico usado para medições de amplificadores Classe D pode ser projetado com os seguintes componentes:
- Indutores e capacitores: Que formam uma rede de filtro LC de segunda ou terceira ordem, com uma frequência de corte ajustada para estar logo acima da faixa de áudio, geralmente em torno de 20 kHz.
O filtro AES17, por exemplo, tem uma frequência de corte ligeiramente acima de 20 kHz, permitindo a passagem de todos os sinais de áudio enquanto atenua as frequências mais altas, incluindo a portadora PWM.
Diagrama de um filtro de exemplo:
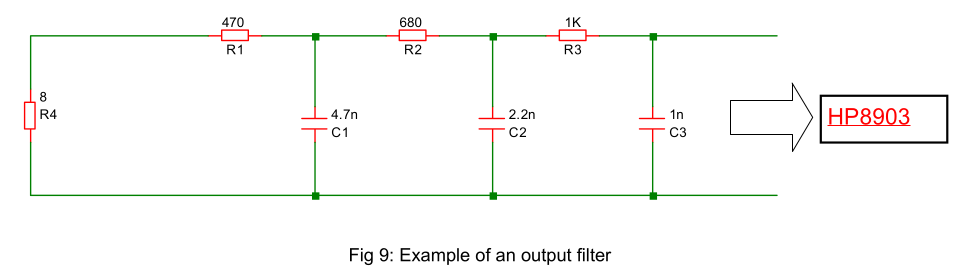
- C3, C1, C2: Capacitores responsáveis pela filtragem de altas frequências.
- R2, R1, R3: Resistores que controlam o comportamento da filtragem.
Esse tipo de filtro é adicionado entre a saída do amplificador e o analisador de áudio para garantir que apenas o conteúdo de áudio (20 Hz – 20 kHz) seja medido.
4. Parâmetros de Medição Comuns
Distorção Harmônica Total (THD):
Como mencionado anteriormente, o THD mede a quantidade de distorção harmônica gerada pelo amplificador. A THD é medida aplicando-se um sinal senoidal de entrada e comparando o conteúdo harmônico indesejado na saída.
Ruído e SNR (Relação Sinal-Ruído):
O ruído é outro parâmetro importante a ser medido, pois ruídos excessivos no amplificador podem degradar a qualidade do áudio. O SNR (Signal-to-Noise Ratio) é uma métrica que indica o nível de ruído em relação ao nível do sinal desejado. Amplificadores Classe D bem projetados podem ter um SNR elevado, mesmo com a presença da frequência de comutação.
Resposta de Frequência:
A resposta de frequência mede como o amplificador amplifica sinais de diferentes frequências. A faixa de frequência ideal para amplificadores de áudio é geralmente entre 20 Hz e 20 kHz. A resposta de frequência deve ser plana nessa faixa, indicando que o amplificador não amplifica mais ou menos em diferentes frequências.
Fator de Amortecimento:
O fator de amortecimento refere-se à capacidade do amplificador de controlar o movimento do alto-falante. Ele é calculado como a razão entre a impedância da carga (normalmente o alto-falante) e a impedância de saída do amplificador. Um fator de amortecimento elevado significa que o amplificador pode controlar melhor o cone do alto-falante, o que melhora a precisão dos graves e a qualidade geral do som.
5. Exemplo de Processo de Medição
O processo típico de medição para um amplificador Classe D envolve as seguintes etapas:
- Conectar o filtro passa-baixa à saída do amplificador.
- Aplicar um sinal senoidal de teste (geralmente em torno de 1 kHz) ao amplificador.
- Medir a saída filtrada utilizando um analisador de áudio como o APx555, verificando parâmetros como THD, SNR, e resposta de frequência.
- Repetir as medições para diferentes níveis de potência e frequências de sinal de entrada, garantindo que o amplificador opere de forma estável em várias condições.
Medir o desempenho de um amplificador Classe D exige cuidados especiais devido à presença da alta frequência de comutação no sinal de saída. Para garantir medições precisas de THD, SNR e outros parâmetros de áudio, é essencial o uso de filtros passa-baixa adequados, como os filtros AES17, que removem a portadora de comutação.
A qualidade do som de um amplificador Classe D pode ser avaliada com precisão utilizando equipamentos especializados como analisadores de áudio de alta precisão, e os resultados dessas medições são cruciais para otimizar o desempenho do amplificador.
Power Supply Pumping
Power supply pumping é um fenômeno que pode ocorrer em amplificadores Classe D, particularmente em topologias de meia ponte (half-bridge). Esse efeito acontece quando a energia do amplificador flui de volta para a fonte de alimentação, resultando em flutuações na tensão do barramento (bus voltage). Isso pode causar problemas como distorção no áudio, instabilidade e até danos aos componentes.
1. O que é Power Supply Pumping?
O power supply pumping ocorre quando a corrente de saída do amplificador Classe D retorna para a fonte de alimentação em vez de fluir totalmente para a carga (como um alto-falante). Em amplificadores de meia ponte, o fluxo de corrente pode ser bidirecional, o que significa que a energia pode ser “puxada” de volta para o barramento de alimentação, especialmente em baixas frequências de áudio.
Esse fenômeno é mais comum em topologias de meia ponte, onde:
- Em frequências muito baixas (abaixo de 100 Hz), a corrente alternada de áudio pode resultar em uma condição onde parte da energia retorna para a fonte de alimentação.
- Isso causa um aumento na tensão do barramento de alimentação, que pode resultar em distorção e instabilidade, uma vez que o amplificador Classe D modula a potência de saída de acordo com essa tensão.
2. Como o Power Supply Pumping Ocorre?
O fenômeno de power supply pumping está relacionado ao fato de que, em um amplificador Classe D de meia ponte, o caminho da corrente não é sempre unidirecional. Durante certas condições de operação, especialmente quando o amplificador lida com sinais de áudio de baixa frequência, a corrente pode ser “empurrada” de volta para o barramento de alimentação.
Exemplo Prático:
- Quando o amplificador está amplificando um sinal de baixa frequência (como graves profundos), há momentos em que a corrente de saída da carga (alto-falante) retorna para o amplificador.
- Em vez de fluir diretamente para o terra, essa corrente pode recarregar os capacitores do barramento de alimentação, fazendo com que a tensão de barramento aumente.
- Esse excesso de energia retornando para o barramento causa uma flutuação na tensão de alimentação e pode levar à saturação dos capacitores, resultando em variações de tensão que afetam o desempenho do amplificador.
3. Efeitos do Power Supply Pumping no Desempenho
Os efeitos do power supply pumping podem ser prejudiciais ao desempenho do amplificador de várias maneiras:
- Distorção: Quando a tensão do barramento flutua, o ganho do amplificador Classe D também varia. Como o ganho de um amplificador Classe D é proporcional à tensão de alimentação, as flutuações causadas pelo power supply pumping podem levar a distorções audíveis no sinal de áudio.
- Instabilidade: A alimentação flutuante pode causar instabilidade no circuito, resultando em comportamento imprevisível e, em casos extremos, na parada total do amplificador.
- Sobretensão: Se o power supply pumping não for controlado, a tensão do barramento pode ultrapassar o limite de operação dos componentes, como os capacitores e MOSFETs, resultando em danos ao circuito.
4. Estratégias para Mitigar o Power Supply Pumping
Existem várias estratégias para reduzir ou eliminar o power supply pumping, especialmente em amplificadores Classe D de meia ponte:
- Uso de Topologia de Ponte Completa (Full Bridge):
- Uma das formas mais eficazes de evitar o power supply pumping é usar a topologia de ponte completa em vez de meia ponte. Na ponte completa, o fluxo de energia é equilibrado entre os dois ramos do amplificador, o que significa que a energia que, de outra forma, retornaria para o barramento é consumida pela outra metade do circuito.
- Dessa forma, a energia é reciclada internamente, eliminando o retorno para o barramento de alimentação.
- Capacitores de Barramento Adequados:
- O uso de capacitores de barramento de alta capacidade pode ajudar a estabilizar a tensão do barramento, absorvendo parte da energia que retorna da carga. Isso ajuda a suavizar as flutuações de tensão e a evitar picos de sobretensão.
- Capacitores de baixa ESR (Equivalent Series Resistance) são preferidos, pois eles podem lidar melhor com correntes de ripple elevadas, típicas em amplificadores Classe D.
- Diodos de Recirculação:
- Em algumas configurações, diodos de recirculação são usados para desviar a corrente que flui de volta do amplificador, redirecionando-a para outro caminho fora do barramento de alimentação. Isso evita que a energia retorne diretamente para a fonte de alimentação.
- Projeto de Fonte de Alimentação Estabilizada:
- Fontes de alimentação projetadas especificamente para lidar com o power supply pumping podem ser implementadas. Essas fontes possuem mecanismos para absorver a energia devolvida ao barramento, mantendo a tensão de alimentação estável.
- Uma fonte de alimentação regenerativa pode ser usada, permitindo que a energia devolvida seja reaproveitada de forma eficiente.
5. Exemplo de Mitigação: Amplificadores de Áudio Profissional
Em sistemas de áudio de alta potência, como amplificadores de som profissional para shows e eventos, o power supply pumping pode se tornar um problema significativo devido à alta potência e ao uso frequente de baixas frequências (graves). Para mitigar esse efeito, é comum o uso de:
- Fontes de alimentação robustas com alta capacidade de filtragem.
- Topologias de ponte completa, onde o balanceamento de energia entre os dois ramos elimina o problema de energia retornando ao barramento.
Power supply pumping é um fenômeno que ocorre principalmente em amplificadores Classe D de meia ponte, onde a corrente de saída retorna para o barramento de alimentação, causando flutuações na tensão de alimentação. Isso pode resultar em distorção no sinal de áudio, instabilidade e possíveis danos aos componentes.
As principais estratégias para mitigar o power supply pumping incluem:
- Uso de topologias de ponte completa.
- Capacitores de barramento adequados para absorver a energia retornada.
- Fontes de alimentação projetadas para lidar com a recirculação de energia.
Considerações sobre EMI: Qrr no Diodo de Corpo
A interferência eletromagnética (EMI) é um grande desafio no design de amplificadores Classe D, que operam com comutação em alta frequência. Um dos principais contribuintes para o aumento de EMI em circuitos de comutação é a carga de recuperação reversa (Qrr) do diodo de corpo nos MOSFETs. Este fenômeno ocorre durante o processo de chaveamento, gerando picos de corrente e oscilações que aumentam a EMI, comprometendo tanto o desempenho elétrico quanto a conformidade com regulamentos de emissões.
1. O que é o Diodo de Corpo (Body Diode)?
O diodo de corpo é uma característica intrínseca dos MOSFETs de canal N e canal P. É um diodo formado pela junção de material semicondutor dentro da estrutura do MOSFET. Embora o diodo de corpo seja necessário para o funcionamento de certos circuitos, ele tem desvantagens significativas quando o MOSFET é usado em aplicações de chaveamento rápido, como em amplificadores Classe D.
Função do Diodo de Corpo:
- Quando o MOSFET está desligado, a corrente pode fluir pelo diodo de corpo em vez do canal condutor principal.
- Durante o processo de comutação, o diodo de corpo conduz temporariamente até que o MOSFET seja ligado novamente, criando o que é conhecido como corrente de recuperação reversa.
2. O que é Carga de Recuperação Reversa (Qrr)?
A carga de recuperação reversa (Qrr) refere-se à quantidade de carga que deve ser removida do diodo de corpo antes que ele possa desligar completamente quando o MOSFET passa de ligado (on) para desligado (off). Este processo cria uma corrente reversa indesejada que pode gerar picos de corrente e oscilações.
Impacto da Qrr:
- Oscilações e Picos de Corrente: Durante o tempo de recuperação reversa, há uma corrente de pico que flui no sentido contrário ao desejado, o que pode causar ressonâncias com as indutâncias parasitas do circuito, gerando picos de corrente que aumentam significativamente a EMI.
- Perdas de Potência: Além de gerar EMI, a Qrr também aumenta as perdas de comutação, uma vez que o circuito consome energia ao tentar descarregar a carga armazenada no diodo de corpo.
- Aumento da EMI: A comutação rápida associada aos amplificadores Classe D amplifica o efeito da Qrr, resultando em ruído eletromagnético que pode interferir em outros circuitos eletrônicos e afetar a qualidade do áudio.
3. Como a Qrr Afeta a EMI?
A comutação em alta frequência em amplificadores Classe D pode gerar ruídos eletromagnéticos significativos, que são exacerbados pela carga de recuperação reversa no diodo de corpo. A corrente reversa que flui quando o diodo desliga cria uma mudança rápida na corrente, o que gera ruído de alta frequência.
Oscilações no PCB:
Durante o processo de recuperação reversa, a corrente pode gerar oscilações em circuitos parasíticos no PCB (placa de circuito impresso). Essas oscilações, por sua vez, criam emissões eletromagnéticas que podem irradiar para outros dispositivos próximos ou interferir em outros circuitos dentro do próprio sistema.
Ruído Audível e EMI:
Em amplificadores de áudio, o ruído gerado pela Qrr pode ser acoplado ao sinal de áudio, resultando em ruído audível ou zumbidos perceptíveis. Além disso, o ruído eletromagnético gerado pode afetar outros circuitos eletrônicos sensíveis, como rádio, microprocessadores e sistemas de comunicação.
4. Técnicas para Minimizar Qrr e EMI
Vários métodos podem ser aplicados para minimizar os efeitos da Qrr no diodo de corpo e reduzir a geração de EMI em amplificadores Classe D:
- Uso de MOSFETs com Baixa Qrr:
- MOSFETs modernos com diodos de corpo otimizados, como os MOSFETs de super junção ou os MOSFETs Schottky, têm menores cargas de recuperação reversa (Qrr). Isso significa que menos carga precisa ser removida durante o desligamento, resultando em menos picos de corrente e, consequentemente, menos EMI.
- A escolha de MOSFETs com tempos de comutação rápidos e baixos valores de Qrr ajuda a mitigar o problema de EMI em amplificadores Classe D.
- Uso de Diodos Externos com Baixa Qrr:
- Em algumas aplicações, diodos externos de baixa recuperação reversa (geralmente diodos Schottky) são usados em paralelo com o diodo de corpo do MOSFET. Os diodos Schottky têm uma Qrr muito menor em comparação com os diodos de corpo, e a corrente preferencialmente fluirá por eles, minimizando o impacto do Qrr no MOSFET principal.
- Melhoria no Layout do PCB:
- Traços curtos e largos: Reduzir as indutâncias parasitas no layout do PCB é essencial para minimizar as oscilações causadas pela Qrr. Traços mais curtos e largos reduzem a indutância, limitando a amplitude das oscilações de corrente.
- Aterramento adequado: Um bom esquema de aterramento pode ajudar a drenar as correntes de comutação rapidamente, evitando que o ruído seja acoplado a outras partes do circuito.
- Filtros EMI:
- A implementação de filtros passa-baixa ou filtros EMI nos pontos críticos do circuito pode reduzir significativamente a radiação de alta frequência gerada pela Qrr. Esses filtros ajudam a atenuar os picos de corrente e as oscilações de alta frequência que resultam da comutação do diodo de corpo.
5. Considerações sobre a Frequência de Comutação
A frequência de comutação de um amplificador Classe D afeta diretamente a quantidade de EMI gerada. Quanto maior a frequência, mais rápidos os eventos de chaveamento, o que aumenta a geração de EMI. Ajustar a frequência PWM ou usar técnicas como a modulação de frequência espalhada (spread-spectrum modulation) pode ajudar a distribuir as emissões de EMI ao longo de uma faixa de frequências, minimizando os picos de interferência em frequências específicas.
A carga de recuperação reversa (Qrr) do diodo de corpo nos MOSFETs é uma fonte significativa de interferência eletromagnética (EMI) em amplificadores Classe D. O processo de recuperação reversa gera picos de corrente e oscilações que podem irradiar EMI e causar ruído audível, afetando a qualidade do áudio e o desempenho geral do circuito.
As principais estratégias para minimizar os efeitos da Qrr e reduzir a EMI incluem:
- Uso de MOSFETs com baixa Qrr ou diodos Schottky.
- Melhorias no layout do PCB para reduzir indutâncias parasitas.
- Implementação de filtros EMI e ajuste da frequência de comutação para dispersar as emissões de ruído.
Conclusão
Os amplificadores Classe D têm revolucionado o mundo do áudio, oferecendo alta eficiência e potência em comparação com os amplificadores lineares tradicionais. Embora suas vantagens sejam claras, como a eficiência de até 95%, há desafios técnicos envolvidos, como a gestão de distorções, perdas de comutação e interferência eletromagnética (EMI).
Entender o funcionamento teórico de um amplificador Classe D, a comparação entre topologias de meia ponte e ponte completa, e a analogia com conversores buck síncronos é fundamental para projetar sistemas eficientes e com alta qualidade de áudio. Problemas como perdas nos MOSFETs, bus pumping, e a interferência causada pela carga de recuperação reversa (Qrr) no diodo de corpo podem ser abordados com escolhas adequadas de componentes, melhorias no layout do PCB, e estratégias de mitigação de EMI.
O ajuste preciso de parâmetros como dead time é crucial para evitar shoot-through e ao mesmo tempo minimizar a distorção harmônica total (THD). Medir o desempenho de um amplificador Classe D exige cuidados, com o uso de filtros para remover a portadora PWM e garantir leituras precisas.
À medida que a tecnologia de semicondutores continua a evoluir, especialmente com MOSFETs de comutação rápida e diodos de baixa Qrr, os amplificadores Classe D estão cada vez mais se aproximando da qualidade de áudio dos amplificadores lineares, mantendo sua vantagem de eficiência energética. Com otimizações adequadas, eles podem proporcionar uma qualidade de som excelente, com baixa distorção e alta potência, em um formato compacto e energeticamente eficiente.
A adoção contínua de amplificadores Classe D, tanto em sistemas de áudio profissionais quanto em dispositivos de consumo, demonstra a versatilidade dessa tecnologia. A atenção cuidadosa aos detalhes de design discutidos neste artigo garante que os desafios de distorção, eficiência e EMI possam ser controlados, permitindo que os benefícios dos amplificadores Classe D sejam plenamente realizados.
